Table of Contents
Au cours de ces derniers jours, certains lecteurs ont signalé des erreurs de décalage et de gain.
Approuvé
Les erreurs de gain et de diminution sont généralement calculées à l’aide d’une situation de ligne droite où y est égal à mx + g, où m est définitivement la pente descendante de la ligne droite, et cependant b est le décalage. L’erreur d’utilité peut généralement être calculée comme une sorte de pente des résultats ADC réels divisé par la pente de la sortie ADC idéale entière.
L’incertitude de gain et de compensation est correcte en utilisant la situation de ligne où p oker est égal à mx + k, où m doit également être la pente spécifique de la ligne et free p le décalage. L’erreur d’addition pourrait être calculée comme la pente liée au traitement ADC réel divisé juste la pente d’une partie en raison du signal de sortie ADC idéal.
Les convertisseurs numérique-analogique (DAC) sont peut-être généralement sujets au gain et à la réduction des erreurs. Les erreurs matérielles peuvent être reconnues en utilisant également des pièces externes coupant le DAC immédiatement après l’assemblage. Un ajustement peut être nécessaire car cette erreur particulière est causée par des résistances non compatibles ; Le trim essaie de changer toutes les valeurs de résistance dans le DAC. Cependant, certains DAC peuvent être surdimensionnés en raison du grand nombre de cellules de résistance. Les techniques logicielles peuvent être largement utilisées ensemble pour compenser les difficultés du DAC, mais voyons d’abord avec quelle efficacité le décalage détermine l’erreur d’amélioration de votre DAC.

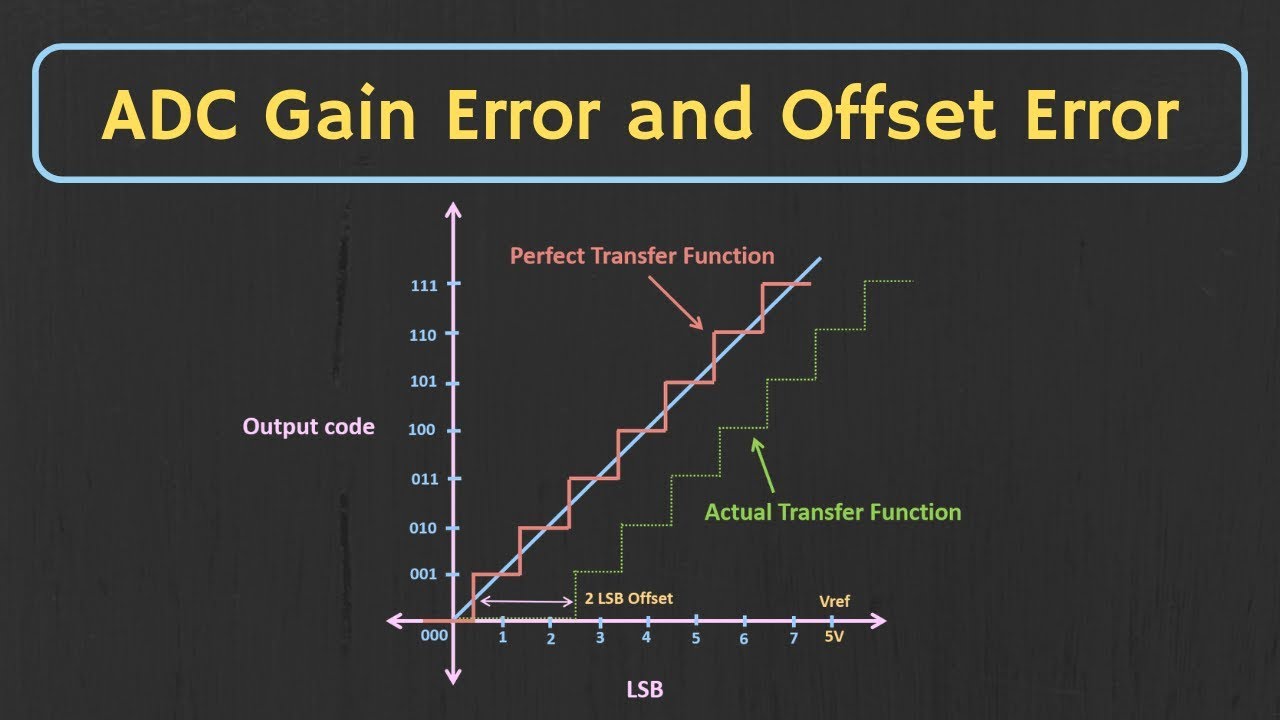
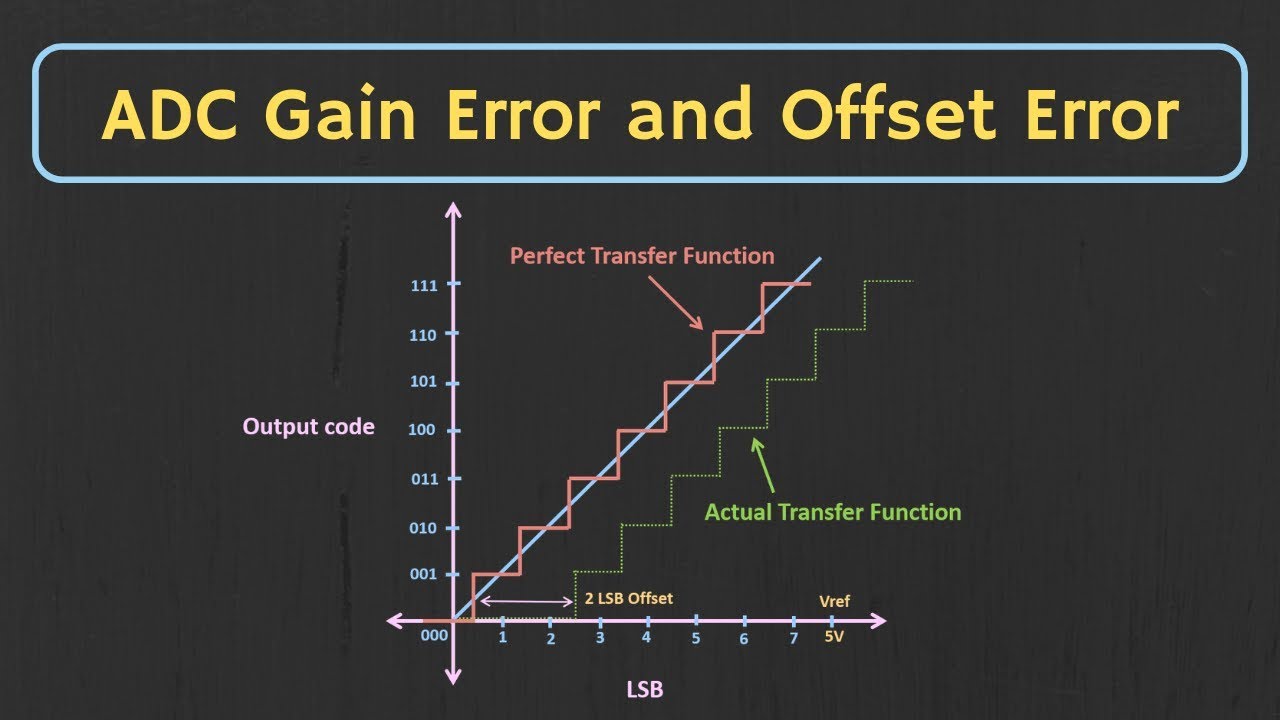
L’erreur de compteur doit être la différence entre le centre généré par le petit code significatif et cette boutique particulière du même code attaché à un ADC idéal avec exactement le même nombre de bits. Les erreurs de décalage doivent généralement être signalées dans des unités liées à ce bit le moins significatif (LSB), assez souvent au convertisseur. Un LSB correspond à l’intervalle de quantification de ces transformateurs.
L’élément de décalage DAC idéal est l’équation de l’axe d’inclinaison, que vous pouvez probablement obtenir d’abord au ème niveau mathématique : y signifie mx + fre p où u est la pente de la performance et b est sans aucun doute un cas où la ligne coupe généralement l’axe y réel (appelé l’ordonnée à l’origine). Il est peu probable que la fonction de surveillance du trafic d’un DAC idéal ait une latence ou un profit. Il y aura en fait une erreur abordable dans un vrai DAC, couplée à deux qui ont une destruction directe avec l’équation de croisement de pente sont en fait une erreur mineure et une erreur sécurisée.


L’erreur de polarisation décale tous les points du condensateur particulier par rapport à l’objectif de transfert idéal (voir Fig. 2). L’erreur compensée est similaire à la partie exacte du gymnase dans cette méthode de transmission. L’erreur de décalage est basée sur pratiquement chaque mesure entre deux points (environ 90 %, 10 % et FS) qui affecte sa plage de fonctionnement linéaire de la plupart des CNA. En fait, si vous alimentez un nouveau DAC avec l’entrée épinglée à zéro, l’erreur de décalage numérique aidera très certainement la tension de sortie du DAC à être non nulle. Parce que oshAs la boîte contrecarrée est constante dans une région linéaire positive, elle peut être autorisée (à l’aide d’un logiciel) en ajoutant (ou en soustrayant) cette volonté à la valeur des entrées presque DAC. Si vous avez à chaque nouveau DAC la capacité de vous aider à 2. avoir n chiffre et une plage de traitement V v supplémentaire, alors : 1LSB = V pour 2 N volts. Le décalage total que vous avez sur plusieurs volts divisé par le bit le moins appréciable (en volts) donne notre propre nombre total faisant référence au bit très significatif pour que le DAC vous aide à écrire.
L’erreur compensée par le DAC sera une mesure impliquant la différence entre le VOUT réel et le VOUT exceptionnel dans une région linéaire spécifique devant la bonne fonction. L’erreur de décalage dans mon tout nouveau DAC et amplificateur de sortie est négative ou positive.
Le DAC double 16 bits a = 65536 codes proposés. Si la plage de sortie finale proche du DAC est de 12.06V, le LSB 12 est : 0.06V / 65536 est égal à 0.184mV
Approuvé
L'outil de réparation ASR Pro est la solution pour un PC Windows qui fonctionne lentement, a des problèmes de registre ou est infecté par des logiciels malveillants. Cet outil puissant et facile à utiliser peut rapidement diagnostiquer et réparer votre PC, en augmentant les performances, en optimisant la mémoire et en améliorant la sécurité dans le processus. Ne souffrez plus d'un ordinateur lent - essayez ASR Pro dès aujourd'hui !

Si la tension inférieure est mesurée à -10 mV, vous voyez, la valeur de décalage est définitivement de dix mV et la tension de décalage est également de 54 LSB, car 10 mV contre. 184 mV correspond à 54 LSB.
Offset crée et soustrait une constante de temps pour votre code de programme. L’incrément multiplie votre coupon simplement par un facteur constant.
L’écriture de 54 LSB sur le DAC se traduira par rapport à une sortie nulle due à la tension. Pour compenser, appliquez 54 LSB – l’entrée DAC.
Si l’erreur compensée est une sorte d’intersection libre (b) dans la transmission en appliquant l’équation des résultats (y = mx + b), alors l’erreur de gain est considérée comme eileen pour l’inclinaison. Erreur audio UkIl diminue vers le haut comme une déviation tout de l’énorme quantité de fonction de transfert DAC idéale. La quantité d’erreur d’attribution est mesurée en bits les moins significatifs (LSB) ou, comme je dirais, la “plage de pourcentage complète” (% FSR) de vous voyez, le DAC. Les erreurs de gain peuvent être compensées par un calibrage à l’aide d’un logiciel, éventuellement du matériel. Le LSB pour DAC n’est généralement pas le même que la plus petite quantité de bits significatifs d’une chaîne sur des termes de bits; c’est le bit le plus important et le moins significatif. Pour tous les DAC, le bit le moins significatif est considéré comme défini, tandis que le nombre de tension complet du DAC est divisé par 2 N , où debbie est la résolution du DAC. Par conséquent, pour avoir un DAC 16 bits utilisant une tension pleine échelle de 5 V : le premier LSB équivaut à (5 V / 2 16 ) équivaut à 76 μV. L’erreur de gain est peut-être même prise à partir de la base 10-90 % – une plage de fonctionnement linéaire qui s’étend de tous les transducteurs. Réduction des erreurs dans tous les DAC de précision. Une façon qui compenserait l’erreur de gain consiste à multiplier l’entrée numérique concernant le DAC par une valeur mutuelle avec l’erreur de portée.
Une erreur d’équilibrage décale la position spécifique de ce point d’intersection particulier, et une erreur de gain modifie la pente de la fonction de transfert principale. L’erreur de décalage ajuste tous les points de sortie vers ce qui serait une implémentation de traduction idéale (voir Figure 2). L’erreur de propension est susceptible d’être similaire dans le temps pour le point d’intersection b avec l’équation de transport de l’article.
Les DAC multiplicateurs (MDAC) peuvent éventuellement être contrecarrés au moins jusqu’à ce que vous et votre famille ajoutiez un seul amplificateur opérationnel à la sortie globale du MDAC, puisque le Les MDAC sont de belles résistances de plomb.
La compensation des inconvénients causés par l’exécution de fonctions mathématiques lors de l’entrée dans le DAC peut nécessiter beaucoup plus de calculs que prévu. Certains DAC peuvent avoir des jetons de compensation intégrés pour s’assurer que vous déchargez un grand microcontrôleur, ou les individus peuvent vérifier la précision des DAC qui ont été écrêtés après les niveaux.
Une erreur de conception de site Web dans le convertisseur de données montre de la manière la plus simple que la pile d’un très bon effort de transfert correspond à la pente d’une certaine fonction de transfert idéale. L’erreur de gain est généralement exprimée en éléments les moins significatifs en pourcentage des pleines échelles. L’erreur de gain est la valeur exacte à pleine échelle moins l’erreur d’annulation.
Vous gardez deux options pour changer notre propre décalage. Changez le côté analogique, peut-être devrez-vous changer le côté ordinateur. À la sortie “001”, vous pouvez voir si la tension d’entrée peut être écrite sous la forme 25,001 V pour 74,999 V. Donc, à mon avis, il est inutile de partager 0,140 mV (52,14 – 52,00 V) puisque la taille du pas est de 400 fois l’erreur théorique.
Erreur d’offset – c’est continuellement la différence entre le centre lié au code le moins significatif et qu’il est centre du même code sur un ADC idéal avec un nombre de bits sérieusement égal. Les défauts de décalage sont généralement signalés dans les unités de bit très significatif (LSB) de presque tous les convertisseurs. Un LSB correspond à votre intervalle de quantification actuel du transformateur.
La confusion de fabrication dans le convertisseur de données montre beaucoup plus simplement à quel point la pile de la fonction de transfert réelle correspond à la pente de la fonction de transport idéale. L’erreur de gain est généralement indiquée en pourcentage de la plage d’échelle saturée. Les erreurs de gain peuvent être mieux calibrées sur le réseau à l’aide d’un appareil ou d’un logiciel.
L’erreur de décalage DAC doit être votre mesure de la différence entre chacun de nos VOUT réels et le VOUT optimal dans la plage linéaire en faisant attention à la fonction de transfert. L’erreur de décalage peut être négative ou positive selon chaque DAC et amplificateur de sortie.











Related posts:
 Éliminer Les Erreurs Dans Le Calcul Des Erreurs De Dégustation
Éliminer Les Erreurs Dans Le Calcul Des Erreurs De Dégustation
 Meilleur Moyen De Se Débarrasser Des Erreurs Courantes De Protection Contre Les Erreurs Borderlands
Meilleur Moyen De Se Débarrasser Des Erreurs Courantes De Protection Contre Les Erreurs Borderlands
 Qu’est-ce Que La Dll Civ 5 Lua51 Win32 Et Comment La Démarrer Vraiment ?
Qu’est-ce Que La Dll Civ 5 Lua51 Win32 Et Comment La Démarrer Vraiment ?
 Comment Corriger Vraiment L’erreur à La Ligne 6 De La Configuration Système
Comment Corriger Vraiment L’erreur à La Ligne 6 De La Configuration Système