Table of Contents
Today’s article aims to help you when you get the kalman filter error covariance matrix error.
Approved
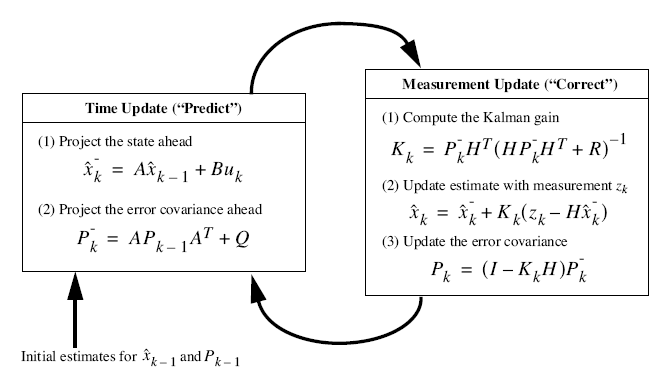
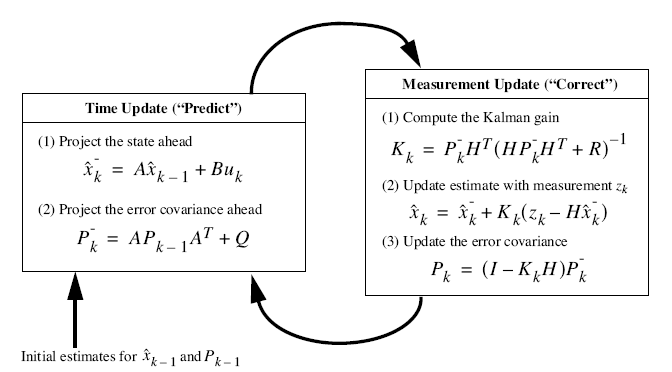
The Kalman filter (KF) is a recursive scheme that instantaneously passes the current estimate of a state and, in particular, to the error covariance matrix with that state. The filter optimally combines the old updated information included in the initial state represented by the measurements with the Kalman purchase matrix from .Filter.
The Kalman Filter (KF) is a recursive scheme that times the current claim score and the error covariance matrix with respect to that state. The filter optimally blends the new knowledge represented by the measurements with the old information embodied in the previous occurrence with the Kalman gain matrix.
The Error Covariance Calculator (ECM) is a dataset that determines correlations in observational variances between all possible pairs of levels used.to her. It is specified as a two-dimensional special array of size NxN, where N is a number associated with vertical levels in personal data probing products.
Estimating The Noise Covariance Qk, Not To Mention Rk
Practical implementation of the Kalman filter is often difficult, as it is especially difficult to get a good estimate of the noise covariance matrices Qk and Rk. Extensive studies have been done to estimate most of these covariances from the data. ComfortableA component of this is the autocovariance least squares (ALS) method, which uses these special time-shifted autocovariances of routine activity numbers to estimate covariances. The GNU Octave and Matlab code used to calculate the noise covariance matrices using the ALS method alone is published online using the GNU General Public License. A Field-Kalman filter (FKF) has been proposed, a convenient Bayesian algorithm that allows simultaneous estimation of state, parameters, but covariance noise [28]. The FKF formula has a recursive formulation, good reading convergence, and relatively low complexity. This gives you the possibility that the FKF algorithm can be your alternative to the autocovariance of the least squares method.
Extended Kalman Method (EKF) is a popular non-linear state estimation method for dynamic models. The error model covariance matrix is often considered to be your own tuning parameter in Simply ekf postulated by our frequent users.
Tuning The Kalman Filter
The Kalman filter, originally developed in 1960 by R. E. Kalman, provides an optimal estimate of how the human body will change, given the glaring measurements and incomplete knowledge of the system . The Kalman filter is similar to the least squares method in many strategies, but it is rather afterAn interesting guess than a package. The standard Kalman filter is primarily intended for use in linear models and is widely used in most industries, including many menu applications. combined with the full nonlinear dynamics according to (2) at the next observation time. The numerical results presented in Sections 4 and 5 below are obtained using this method.
Approved
The ASR Pro repair tool is the solution for a Windows PC that's running slowly, has registry issues, or is infected with malware. This powerful and easy-to-use tool can quickly diagnose and fix your PC, increasing performance, optimizing memory, and improving security in the process. Don't suffer from a sluggish computer any longer - try ASR Pro today!

Square Root Filtering
At Apollo they had very small program words – bits corresponding to the representation of a number with floating point – for your on-board computer. As a result, the companies were very vulnerable, so you can round up the filter errors that men and women found in the simulation. They tried many tricks to get around this dilemma, and the old books still describe the same tricks. However, accessibility hacks come with their own set of problems (unsurprisingly). The right decision was to find a girl named James E. Potter. In In any type of computer, the number of bits determines the size of a number that can be specifically represented. Each additional double bit doubles their still representable number (this is literally only for integers, but similar for floating point types). However, if you imagine storing the concept with (x), you have stored the concept with (sqrtx). Square root requires a smaller range of sizes; Thus, for the same sentence size in a computer, we can represent a much larger (x). Of course, we can’t add (sqrtx) containing (sqrty) with the same arithmetic, so keeping the square root form would take more effort. However, Potter, who has been driving home from work all weekend, has found an elegant way to do this using Kalman filters. I, of course, give the derivation of the covariance update equation. I will do all this as detailed as possible, without strategies, it will seem so long. Some of you may also believe it in detail, but on the other hand it will help a number of people.people better understand it.

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()